指南针传感器取值范围:0(可以等于0)到360(不可以等于360)
指南针传感器的类型:模拟输入
指南针传感器的安装:省略
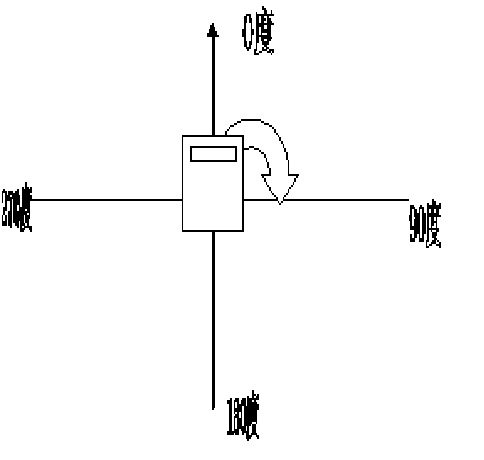
指南针传感器在机器人初始化的时候,机器人正前方为0度方向。在之后的整个运行过程中,只有处于该方向时,指南针的读取值才为0度(也就是说,0度方向不会因为机器人的朝向的改变而改变)。右边为90度、后面为180度,左面为270度。
如果机器人要从0度转为90度。代码如下:
While(analog(6)<85)//
{
Motor(0,50);
Motor(1,-50)
}
此处是要转到90度,为什么循环控制中写的是小于85度,而不是90度。这里考虑了机器的刹车时间)的时候。
如果说要从270度转到40度怎么写?
1、 可以逆时针转,在转动过程中,角度一直处于递减状态,因此我们可以这样写代码:
While(analog(6)>45){ motor(0,-50);motor(1,50);}
2、 可以顺时针转,在转动过程中,角度在到达360度前,角度处于递增状态;到达360(也是0度)以后,转动过程中也处于递增状态,这里不是得单纯的递增或者递减,因此我们就必须用到条件的复合。可以这样写代码:
While(analog(6)<35 || analog(6)>55){ motor(0,50);motor(1,-50);}